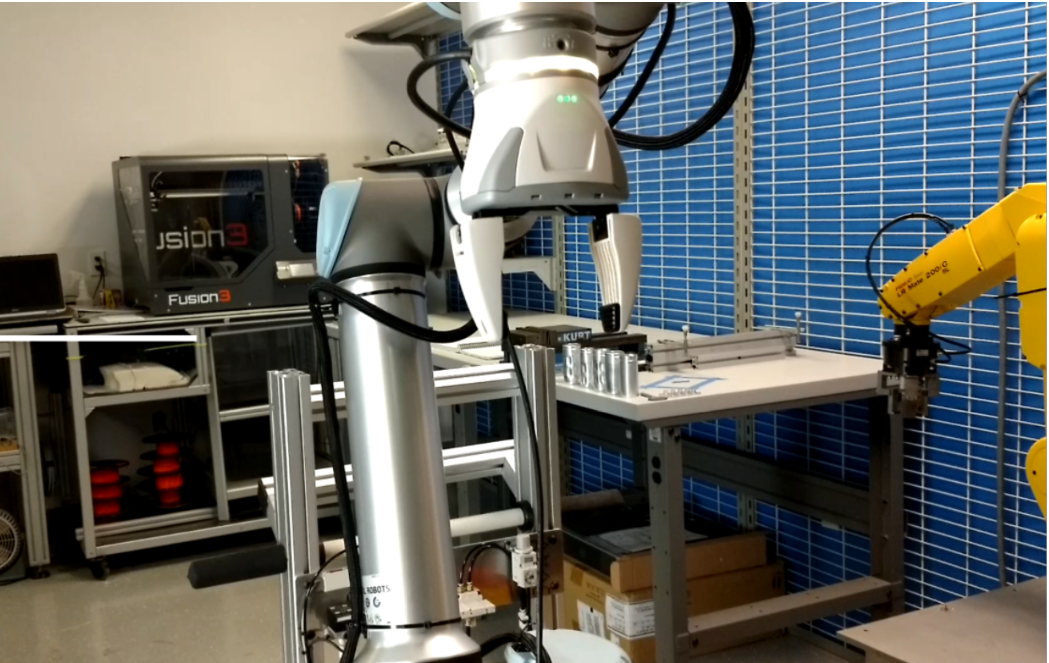
Collaborative Capacitor Inspection Utilizing the UR10e Robot and IFM 3D Profiler
In this Solara Automation lab demo, we selected a bench-mounted IFM OPD100 3D Profiler. To interact with the Schunk EGH Collaborative Gripper, which was installed on the UR10e Universal Robot. The challenge in the application was to create a method for verifying the capacitor type and ensuring the correct workpiece orientation for insertion into a fixture.
The special safety sensors on the UR10e Universal Collaborative Robot prevent injury to humans during contact with an operator. Consequently, this vital feature enables the robot to operate safely near humans without requiring costly safety fencing or light curtain protection.
When choosing the Schunk EGH Electric Collaborative Gripper for the EOAT, we observed that it’s designed as a flexible gripper with a long adjustable stroke. This design renders it ideal for seamless automation with cobots. Moreover, it’s highly suited for tasks involving handling, assembly, and electronics, especially in situations necessitating the movement of small to medium-sized workpieces.
Some of the unique features of the Schunk EGH Collaborative Gripper and why we chose it:
- Airless all electric design that is ideal for laboratory environments.
- Moreover, a long and freely programmable stroke allows for flexible workpiece handling.
- Plug & Play for a quick and simple start of production.
- Additionally, an integrated status display provides a visual indicator of the application state.
- IO-Link control empowers prepositioning of the gripper finger and provides condition feedback.
- Utilizing parallel kinematics, the gripping movement guarantees a constant gripping force over the entire stroke. This consistency is vital for maintaining precision in gripping tasks.
- Easily accessible quick-release fastener in the ISO pattern.
- Optionally attachable flexible fingers significantly enhance flexibility and range. In the demonstration video , we illustrate how the IFM OPD100 3D Profiler effectively translates orientation data to the robot, checking for workpiece type to detect a changeover process. Leveraging our expertise in Universal Robots and robot integration, we’ve designed this demo to simulate a real-world scenario for 3D profile inspection, ensuring the insertion and verification of workpiece type. For more information on the Schunk EGH Collaborative Gripper, please visit: Schunk EGH GripperFor more information on the OPD100 3D Profiler, please visit: IFM OPD100
To learn more about what we can do for your application, please visit: Solara Automation
Or reach us at (919) 534-1500 or info@solaraautomation.com
